 资(zī)讯
资(zī)讯各位请打开脑洞(dòng),猜(cāi)猜(cāi)比猎豹跑得还(hái)快的机器(qì)人长什么样(yàng)?

答案(àn)揭晓 ——
是不(bú)是和你想象(xiàng)中的不太一样?
首先这个小家伙(huǒ)确实是机器人,它属于软体机(jī)器人这类。
另外别看它(tā)其貌不扬,但(dàn)人家运动速(sù)度最快(kuài)可达 70 体长 / 秒;而猎(liè)豹作为陆地上(shàng)跑(pǎo)得最快的动物,最快速度(dù)也不(bú)过 23 体长 / 秒(miǎo)。
也就是(shì)说,这个小机器人的“奔跑(pǎo)”速(sù)度(dù)是猎豹的 3 倍多!
除了跑,它还会游泳,在水中的速度可达(dá) 4.8 体长/ 秒,而奥运游泳冠军速度约为每秒一点几个(gè)体长(zhǎng)。
在此说明一下,以体长 / 秒(BL / s)为(wéi)单(dān)位的相对速度,主(zhǔ)要是为了量化不同大小生(shēng)物体的速度(dù)。
这个(gè)超级灵活的(de)机器人出于(yú)一群奥(ào)地利科学(xué)家(jiā)之手,相关(guān)科(kē)研成果目前已登上了 Nature 子刊 Communications。

下面就来看看这个(gè)相貌(mào)平平的家伙为何能跑(pǎo)得这么快。
柔(róu)性材料 + 电磁感应实现快速移动
其中(zhōng)一个很重要的因素就是它(tā)“软”。
常见的机器人(rén)一般都(dōu)是由金属和塑料等刚(gāng)性材(cái)料制成的。
与之(zhī)不同的是,制作软体(tǐ)机(jī)器人材料主要为(wéi):聚(jù)合物和形状记忆合金等(děng)柔(róu)性材料,这些合金会随着温(wēn)度变化发(fā)生形变。
这样其实和(hé)生(shēng)物体(tǐ)或活(huó)组织的方式运作更(gèng)相似。
就拿这个软体电磁(cí)机器人 (SEMR)来说(shuō),其(qí)线圈由一种叫 Galinstan(镓铟锡合金)的(de)金属合(hé)金构成,是通过液体(tǐ) 3D 打(dǎ)印技术制作的。
该线圈被(bèi)嵌入弹(dàn)性(xìng)外壳,并(bìng)露(lù)出一部(bù)分(fèn)来与外部电极相(xiàng)连。

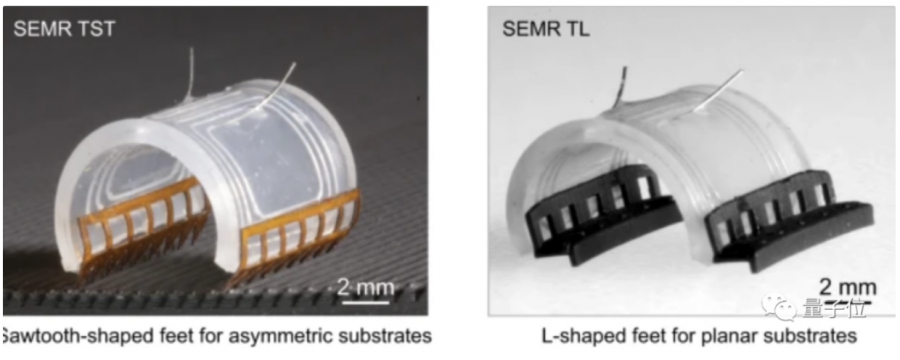
此(cǐ)外,该机器人还配备了(le)小型(xíng)自供电控(kòng)制(zhì)器来控制形状,并且还(hái)有 L 形或(huò)锯齿形 “ 脚 ”。
然后还(hái)有一(yī)个因素就是(shì)它(tā)“弯。因为研究者表示,自然界中,许多动物都(dōu)是靠弯曲身体的扩张和收缩来快速移动的。
这里再回顾一(yī)下猎豹奔跑:

至(zhì)于这个机(jī)器人是怎(zěn)么(me)动的,它主要靠的就是电磁感应:在静态磁场中受到时变电流影响而(ér)运动。
研究者(zhě)测试(shì)了它的速度并发现,这种软体机器(qì)人在平面上的移动速度可达 35 体长 / 秒;而在三维折叠(dié)物体表面上,其移(yí)动速度达到最(zuì)大值:每秒移动 70 倍体长。
据论文内(nèi)容,这(zhè)个(gè)速(sù)度比其他软体机器人快了约 17.5 倍。
除了跑得快(kuài)还灵活且耐造
前(qián)文提到这个机器人还有控制器,这玩意儿(ér)可以(yǐ)选择性地控制机器人身体的(de)不同部分,以实现转向、跳跃(yuè)等动作。

别(bié)看它(tā)长得这么迷你(尺(chǐ)寸为 9mm×9mm×0.8mm),但实际上非常(cháng)耐造:
当小机(jī)器人正在行(háng)走时,研(yán)究者(zhě)“趁其不注(zhù)意”,用其体重 1764 倍(bèi)的外力把它压扁了。
结果(guǒ),经(jīng)过如此大的打击后,这个机器人表示:没事(shì)儿(ér)。
研究者指(zhǐ)出,这些功能也是(shì)很(hěn)重要滴!因为(wéi)这样它(tā)就能适应更多复杂、恶劣的环境,具(jù)有(yǒu)更大的实用价值。











")
举报(bào)中心")
